Pusiau automatinis skydų lankstiklis EMBC 1402
gaminių specifikacija
| Nr. | vardas | Parametras | Vienetas |
| 1 | Didžiausias ilgis | 1400 | mm |
| 2 | Maksimalus plotis | 1400 | mm |
| 3 | Min.Lenkimo ilgis | 200 | mm |
| 4 | Min.lenkimo plotis | 260 | mm |
| 5 | Maksimalus lenkimo storis (MS, UTS410N/mm²) | 1 | mm |
| 6 | Min. lenkimo storis (MS, UTS410N/mm²) | 0.5 | mm |
| 7 | Maks.lenkimo aukštis | 170 | mm |
| 8 | Viršutinio preso ilgio reguliavimo režimas Rankinis | ||
| 9 | Vidutinis energijos suvartojimas | 2.2 | KW |
| 10 | Svoris | 15 | T |
Charakteristikos ir pagrindinė struktūra
Kalbant apie mašinų projektavimą ir gamybą, Hebei Hanzhi CNC Machinery Co., Ltd.daugiausia dėmesio skiriama šiems dalykams:
1. Marketingo koncepcija, kuri siekia praktiškumo ir taupo vartotoją kiekvieną centą.
2. Labai patikima ir tiksli dizaino koncepcija.
3. Aukštos kokybės žaliavos, įsigytos dalys ir išskirtinė apdirbimo technika.
4. Daugiau dėmesio skiriama naudojimo paprastumui ir priežiūrai bei saugai.
5. Mažas priežiūros greitis ir priežiūros išlaidos toje pačioje pramonės šakoje.
rėmelis
A. 3D baigtinių elementų modelio kūrimas: remiantis sukurtu ir suprojektuotu 3D kietojo modelio skaičiavimams sukuriamas dinaminis baigtinių elementų modelis.Modelyje atsižvelgiama į pagrindinius jėgos perdavimo jungties komponentus.Jėgos per jungtį perduodamos į guolį ir tada atliekama guolio stiprumo analizė.
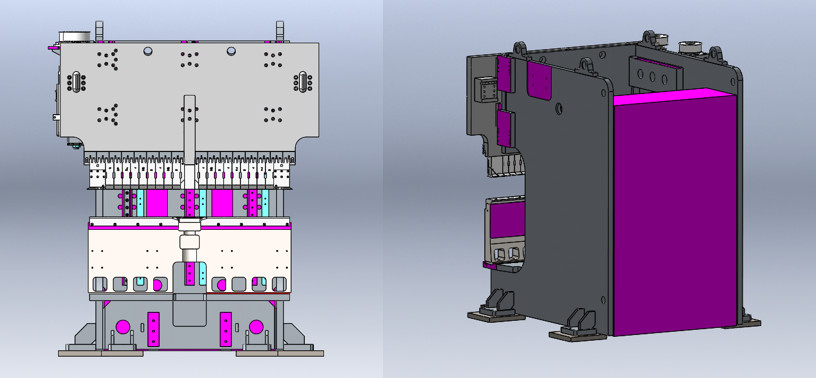
1 pav. Plokščių lankstiklis Baigtinių elementų dinaminis visos mašinos modeliavimas
B. Statinės analizės rezultatų analizė: Dėl lėto apdirbimo greičio stiprumo analizė gali būti sumažinta iki statinės problemos.Remiantis plokštės gniuždymo apkrova ir lenkimo apkrova vertikalia pjovimo galvutės kryptimi, toliau pateikiami įtempių ir deformacijų rezultatai.Didžiausias įtempis atsiranda kūno gerklėje, kai didžiausias įtempis yra 21,2 MPa, o didžiausia deformacija atsiranda viršutiniame korpuso gale, kai didžiausia deformacija yra 0,30 mm.
Remiantis baigtinių rėmo elementų analizės rezultatais, medžiaga buvo pasirinktas Q345 plienas;buvo priimtas anglies dioksido skydo suvirinimas;buvo atliktas grūdinimas, siekiant pašalinti suvirinimo sukeliamus įtempius;taip užtikrinamas įrangos tikslumas, stabilumas ir didelis standumas ilgalaikiam darbui.
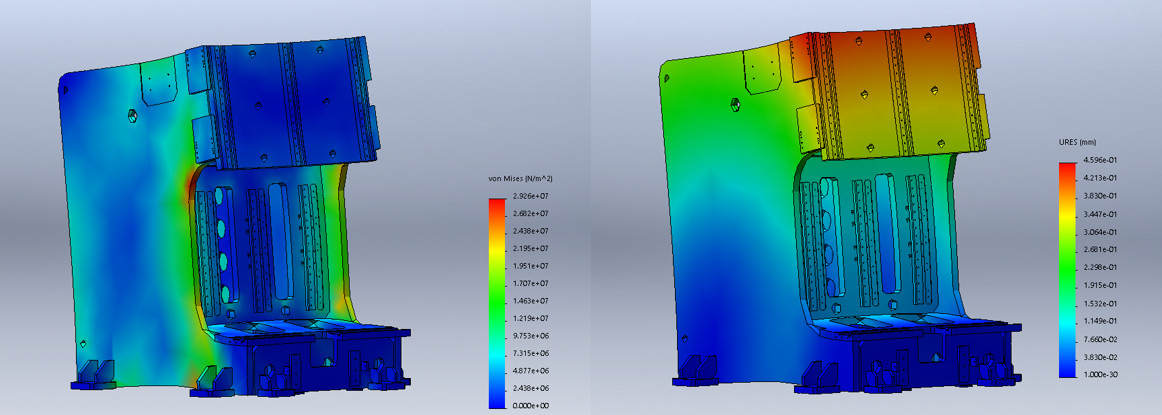
2 pav. Rėmo įtempių poslinkio deformacijų analizės rezultatai
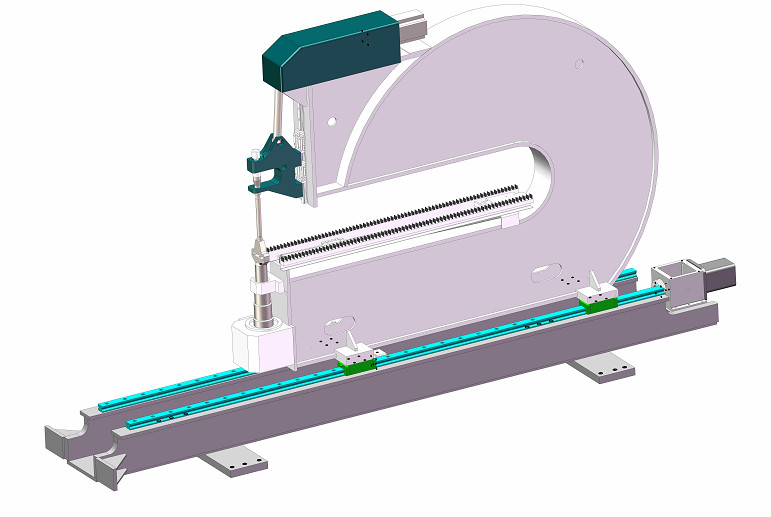
Viršutinis avinas
Šią dalį daugiausia sudaro slankiklis, didelio sukimo momento švino varžtas, reduktorius, kreipiamasis bėgis, servo variklis ir pan.Pagrindinę pavarą valdo servo variklis, o valdymo režimas yra servo sinchroninis valdymas, kuris gali veiksmingai užtikrinti padėties nustatymo tikslumą, greitą greitį ir aukštą valdymą.Priekinio varžto ir kreipiamojo bėgio sutepimas taikomas automatiniam tepimui, o tepalas yra 00 #, kuris užtikrina švino varžto ir kreipiamojo bėgio tarnavimo laiką ir tikslumą ilgą laiką.
Viršutinio slankiklio statinės analizės rezultatai: viršutinės lentelės įtempių poslinkio inkstų diagrama rodo, kad didžiausias įtempis yra viršutinėje dalyje, didžiausias įtempis yra 152 mpa, didžiausia deformacija rodoma viršutinės lentelės viršuje, didžiausia deformacija yra 0,15 mm
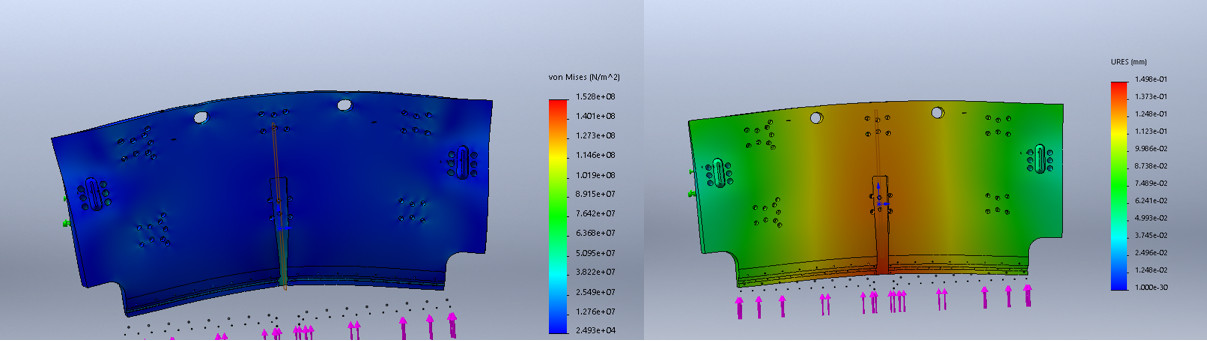
3 pav. cilindro įtempių poslinkio analizės rezultatai
Pagal baigtinių elementų analizės rezultatus, kaip medžiaga buvo pasirinktas Q345 plienas;Naudotas CO2 ekranuotas suvirinimas;buvo atliktas grūdinimo apdorojimas, siekiant pašalinti suvirinimo sukeliamą įtampą;taip užtikrinamas įrangos tikslumas, stabilumas ir didelis standumas ilgalaikiam darbui.
Lenkimo mazgas
Lenkimo bloko jėgos pavaros dalis yra varoma servovarikliu, nenaudojant hidraulinės sistemos, o tai turi didelių pranašumų mažinant komponentų nusidėvėjimą ir transmisijos efektyvumą, atsižvelgiant į propaguojamą energijos taupymo ir aplinkos apsaugos politiką. valstybės.
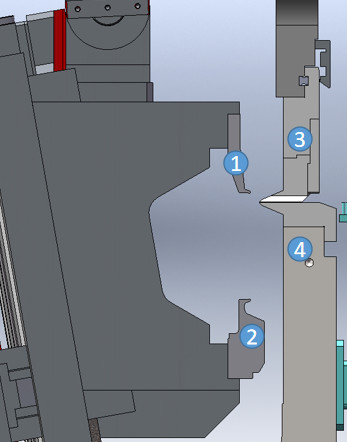
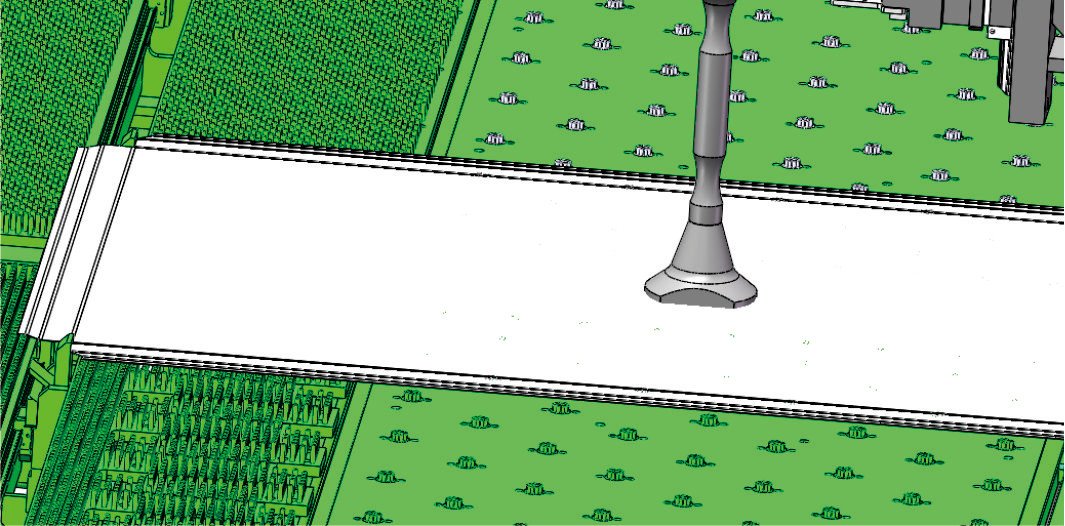
Pagal lapo informacijos nustatymą sistema automatiškai apskaičiuoja viršutinio presavimo peilio 3 padėtį ir kontroliuoja atstumą tarp viršutinio presavimo peilio 3 ir apatinio spaudimo peilio 4, kad pritvirtintų lakštą;pagal sistemos nustatymą, nesvarbu, ar šis lenkimas yra aukštyn ar žemyn, apatinis spaudimo peilis 2 arba viršutinis spaudimo peilis 1 yra valdomas, kad greitai pereitų į lenkimo padėtį;pagal skirtingus nustatymo kampus, lenkimo peilis valdomas, kad judėtų į apskaičiuotą padėtį pagal patentuotą kampo skaičiavimo formulę, kad būtų užbaigtas lenkimas.
Pagal skirtingus lenkimo būdus galima suskirstyti į kampinį lenkimą, didelio lanko lenkimą, išlyginantį lenkimą ir kt., Kuris kampinis lenkimas skirstomas į lenkimą aukštyn ir lenkimą žemyn.
Viršutinis preso blokas
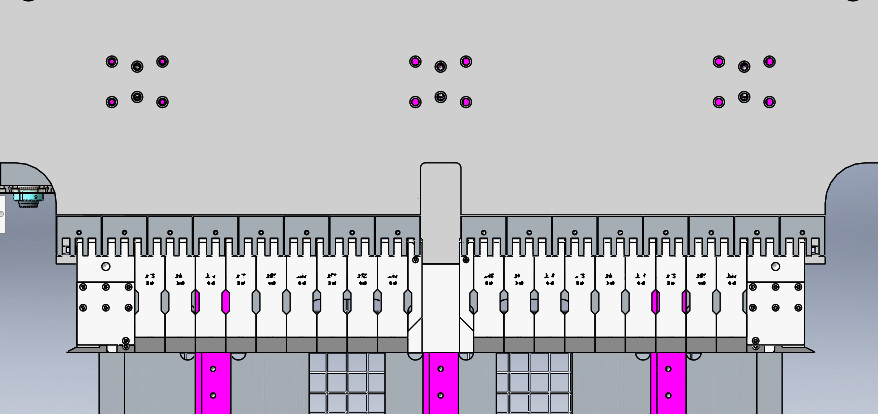
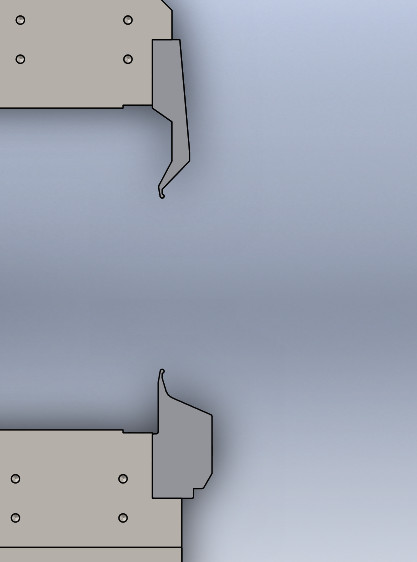
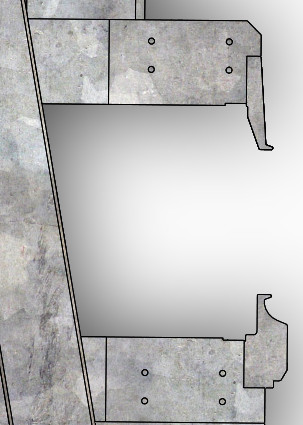
6 pav. Viršutinis presavimo įrenginys
Viršutinis presavimo blokas: visų lenkimo procesų dalis, EmbC pilnas servo daugiašalis lenkimo centras turi specialų viršutinį presavimo įrenginį, kurį galima montuoti ir rankiniu būdu reguliuoti įvairiems plokščių ilgiams.
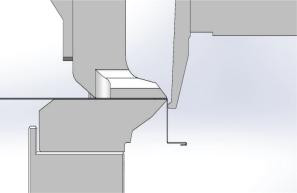
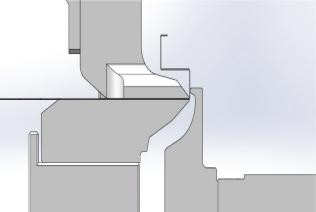
Siekdami atitikti vengimo lenkimo dėžės reikalavimus, sukūrėme specialų vengimo štampą.Prieš spaudžiant, dalis vengimo matricos yra schemoje prieš spaudimą esančioje būsenoje ir prasideda šėrimas.Po šėrimo jis yra paspaudus diagramoje ir prasideda lenkimas.Po lenkimo viršutinis slankiklis juda.Judant viršutiniam slankikliui, dalis A automatiškai pereis į būseną prieš paspaudžiant.Viršutiniam slankikliui pasisukus į nustatytą padėtį, prasideda kitas judėjimas.
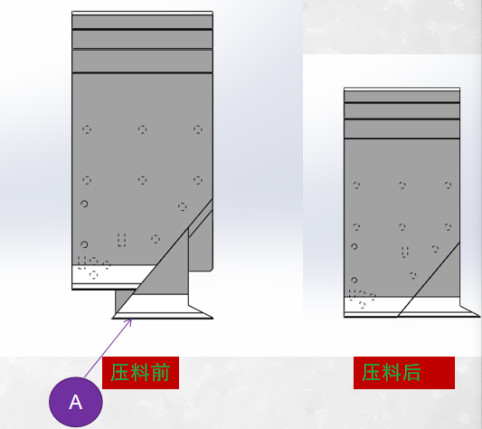
Fig.7 Lenkimo dėžės išvengimas
Įrankis
Lenkimo įrankiai skirstomi į viršutinius lenkimo įrankius ir apatinius lenkimo įrankius.Specialūs lenkimo įrankiai gali būti pritaikyti pagal skirtingus kliento reikalavimus.
2. Lėkštės padavimo įrenginys:
Lakštinio metalo judėjimą, suspaudimą ir sukimąsi atitinkamai valdo robotas 1, tvirtinimas 2 ir besisukantis diskas 3.Viso apdirbimo proceso metu lakštinio metalo padavimas yra valdomas servovarikliais, todėl galima automatizuoti ir greitai nustatyti padėtį, sumažinti judėjimo laiką ir padidinti efektyvumą.Dėl konstrukcinių naujovių ir visiško servo valdymo pritaikymo lakštinio metalo suspaudimas ir sukimas gali išlaikyti tikslumą viso daugiašalio lenkimo centro darbo procese.Daugeliui sudėtingų ruošinių, net ir daugiakampių, galima garantuoti nuolatinį 0,001 sukimosi tikslumą.
3. Plokštės padėties nustatymo įrenginys:
Plokštės padėties nustatymo bloką sudaro kairysis padėties nustatymo kaištis, dešinysis padėties nustatymo kaištis, priekinis padėties nustatymo kaištis ir galinis padėties nustatymo kaištis;kairysis ir dešinysis padėties nustatymo kaiščiai nustato plokštelę į kairę ir dešinę.Priekinis padėties nustatymo kaištis ir galinis padėties nustatymo kaištis valdo priekinę ir galinę plokštės padėtį ir užtikrina, kad plokštė būtų lygiagreti viršutiniam ir apatiniam presavimo peiliui, kuris naudojamas plokštės padėties nustatymo tikslumui užtikrinti.
Plokštės padėties nustatymo įrenginys gali automatiškai nustatyti plokštę ir automatiškai užbaigti daugiašalį lenkimą vienu metu, o tai labai sutrumpina lenkimo ciklo laiką, kontroliuoja plokštės šlyties paklaidą pirmojo lenkimo metu ir užtikrina lenkimo tikslumą.
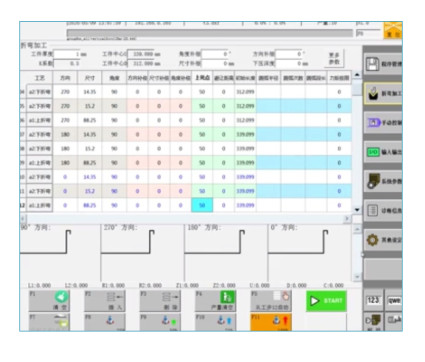
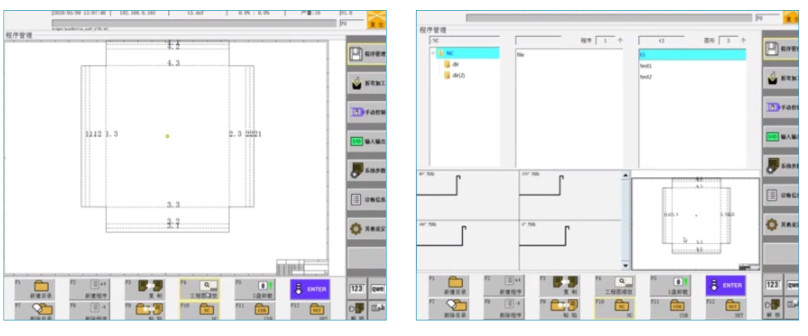
4.CNC sistema
A: Bendrai sukurtas CNC sistemas ir programinę įrangą galima pritaikyti ir valdyti greitai ir lengvai
B: Pagrindinės savybės.
a) .EtherCAT magistralės valdymo metodas su dideliu atsparumu trukdžiams
b) Palaiko tiesioginį programavimą, kiekvieno žingsnio lenkimo duomenis galima įvesti į formą
c) Atrama lenktam lenkimui
d) Visiškai elektrinis servo valdymas
e) lenkimo kompensavimo parama
f) Dvimačio programavimo palaikymas
2D programavimo funkcija, importuoti 2D DXF piešimo duomenis, automatiškai generuoti lenkimo procesą, lenkimo dydį, lenkimo kampą, sukimosi kampą ir kitus duomenis.Po patvirtinimo galima atlikti automatinį lenkimo apdorojimą
Pagrindinės dalies sąrašas
| Nr. | vardas | Prekės ženklas |
| 1 | Rėmas | Išmintis |
| 2 | Įrankis | Išmintis |
| 3 | Lenkimo mazgas | Išmintis |
| 4 | CNC sistema | Išmintis |
| 5 | Servo variklis | Išmintis |
| 6 | Servo vairuotojas | Išmintis |
| 7 | Geležinkelis | Išmintis |
| 8 | Rutulinis sraigtas | Išmintis |
| 9 | Reduktorius | Taivanas |
| 10 | Pertraukiklis | Šneideris |
| 11 | Mygtukas | Šneideris |
| 12 | Elektrinė dalis | Šneideris |
| 13 | Kabelis | Yicu |
| 14 | Artumo jungiklis | Omron |
| 15 | Guolis | SKF/NSK/NAICH |
4) Staklių projektavimas, gamyba, patikrinimas ir montavimas atitinka šiuos standartus.
1、GB17120-1997
2、Q/321088JWB19-2012
3, GB14349-2011
Atsarginių dalių ir įrankių sąrašas
| Nr. | vardas | Qt. | Pastaba |
| 1 | Įrankių dėžė | 1 | |
| 2 | Įdiekite padą | 8 | |
| 3 | Inner šešiakampis veržliaraktis | 1 komplektas | |
| 4 | Rankinis degalų papildymo pistoletas | 1 | |
| 5 | CNC sistemos vadovas | 1 | |
| 6 | atviras veržliaraktis | 1 |





